Early Season Hiring has now closed. Regular Season Hiring for the 2025-26 School Year opens August 31st!
We are excited to be back for Year 5 of the AutoDrive Challenge II! We are seeking motivated students who are eager to learn, contribute, and help the team achieve success in Year 5! Apply on the Team page of our website of head over to our instagram @queensautodrive.
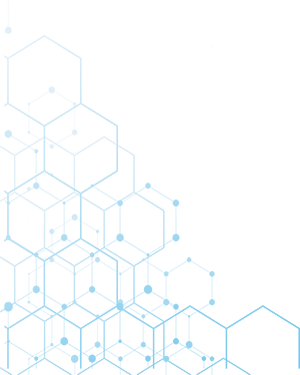
Below is a break down of our team structure. This overview will help you understand how every team works together to make Queen's AutoDrive successful, both on and off the track
Scroll down to learn more about our open positions and the specific divisions we are hiring for, including detailed descriptions of responsibilities.
Team Structure
Description
The Statics & Communications team is responsible for half the competition's scoring. As a memeber, you will contribute to our external image by helping craft presentations, communication reports, and networking initiatives that showcase Queen's AutoDrive to industry sponsors.
Responsibilities
- Develop and deliver scored presentations for competition judges and industry sponsors
- Prepare technical communication reports set out to achieve the allocated points
- Manage the team's external image and brand through professional documentation and visual design
- Coordinate and participate in networking events with industry partners
- Collaborate with subteams to gather technical information and present it in a clear, compelling way
- Ensure compliance with competition guidelines for communication deliverables
- Contribute to sponsor relations by creating polished outreach materials and correspondence
Description
The Operations Team makes sure we shine outside the garage — from planning events like the Sidewalk Sale and Queen's in the Park, to merch design, promotions, travelling logistics, and external relations.
Responsibilities
- Plan and execute team events, such as the Sidewalk Sale, Queen's in the Park, and the Auto Show
- Design and manage team merchandise to strengthen our brand presence
- Build and maintain positive relationships with industry sponsors and external partners
- Represent Queen's AutoDrive at public engagements
- Collaborate with internal subteams to gather technical content for clear, compelling communication
- Manage the team's external image across all platforms and initiatives
Description
The Autonomy Team design the decision-making and path-planning systems — the algorithms that tell the car how to navigate.
Responsibilities
- Develop algorithms for vehicle decision-making and path-planning
- Design systems that allow the car to navigate safely and efficiently in dynamic environments
- Test and validate path-planning strategies using simulation and real-world data
- Optimize algorithms for speed, safety, and reliability under competition constraints
- Document designs, methodologies, and results for internal review and competition scoring
Description
The Perception Team collects, constructs, and understands the environment around us and our place in it. They work with LiDARs, cameras and other sensors, as well as neural networks and deep learning to make this happen.
Responsibilities
- Collect and process data from LiDAR, cameras, and other sensors
- Construct accurate representations of the vehicle's surroundings
- Develop and implement neural networks and deep learning models for 3D object detection, classification, and tracking
- Fuse multi-sensor data to improve environment understanding and reliability
- Test and validate perception algorithms in simulation and real-world scenarios
- Document methodologies, results, and system performance for internal review and competitions
Description
The Sim & Integration Team builds and maintains our simulation environments and make sure every system, project, and subteam integrate and works together seamlessly.
Responsibilities
- Build and maintain simulation environments for testing vehicle systems
- Integrate software, hardware, and subteam projects to ensure cohesive system performance
- Test and validate system functionality in simulated and real-world scenarios
- Identify and troubleshoot integration issues across subteams
- Collaborate with perception, Autonomy, and other teams to ensure seamless operation
- Document simulation setups, integration processes, and test results for internal review and competition purposes
Description
The Infrastructure Team gets hands-on with the car's electrical, firmware, and hardware — making sure everything runs smoothly.
Responsibilities
- Design, install, and maintain hardware systems on the vehicle, with a focus on durability and reliability
- Weather-proof sensors and critical components to ensure optimal performance in all conditions
- Implement hardware updates and modifications to improve vehicle functionality
- Test and validate hardware performance in real-world conditions
- Document hardware designs, installations, and maintenance procedures
Description
The Embedded Systems Team handle in-vehicle communication — making sure our programs can actually talk to the car.
Responsibilities
- Develop and maintain in-vehicle communication systems to enable software-to-hardware interaction
- Implement and optimize protocols for reliable data exchange between sensors, controllers, and the vehicle's ECU's
- Test and debug embedded software to ensure real-time performance and safety
- Document communication architectures, protocols, and system updates for internal review and competitions